
Where is Researchers Create Tiny, Cicada-Like Drones to Invade
When we think of drones, we envision massive square machines, which resonate like frantic seagulls. But what if your drowning was too small to accidentally swallow?
This is what MIT Assistant Professor Kevin Yufeng Chen created: a set of small drones with elastic actuators that power insect-like wings. The entire package weighs 665 milligrams or “roughly the mass of a large bumble bee” according to the chain.
Chen created drones with MIT PhD student Zhijian Ren, Harvard University PhD student Siyi Xu and Hong Kong robotic Pakpong Chirarattanon. These small, soft drones are used for targets to locate close locations where hardened drones will break upon contact with hard surfaces. It is very agile.
The team calls the drone a “hybrid soft-rigged”, a design that ensures drones can flap their wings 500 times per second, but can also avoid the various abrasions and forces that turn a normal drone into bits Can.
“You can kill it when it flies, and it can recover,” Chen said. “It can also perform aggressive maneuvers like Somersault in the air.”
The chain expects the drone to be used in tight spaces such as engines and machinery.
Think of an inspection of a turbine engine. You want a drone to go around [an enclosed space] with a small camera to check for cracks on the turbine plates, “Chen told MIT’s Daniel Ackerman.
The drones are currently square, but the intention of the chain is to look like Dragonflys, which further enhances the robot’s ick factor. Fortunately, there are no plans to launch these schemes on an unheard public any time soon.
If you have ever shoved a mosquito away from your face, only to return it again (and repeatedly), you know that insects can be remarkably acrobatic and resilient in flight. Those traits help them navigate the aerial world with all their wind gusts, obstacles, and general uncertainty. Creating such traits in flying robots is also difficult, but MIT Assistant Professor Kevin Yufeng Chen has created a system that approaches the agility of insects.
Chen, a member of the Department of Electrical Engineering and Computer Science and the Research Laboratory of Electronics, has developed insect-shaped drones with unprecedented dexterity and flexibility. Aerial robots are powered by a new class of soft actuators, which allows them to withstand the physical paths of real-world flight. Chen hopes that robots may one day help humans with pollination of crops or by inspecting machinery in tight locations.
Chen’s work appears in IEEE Transactions magazine on robotics this month. His co-authors include MIT PhD student Xizian Ren, Harvard University PhD student Siyi Xu, and Robotic Pakpong Chiraratanan from City University of Hong Kong.
Typically, drones require wide open positions because they are neither sufficiently agile to navigate confined spaces nor strong enough to withstand crowded collisions. “If we look at most drones today, they are usually quite large,” Chen says. “Most of their applications involve flying outwards. The question is: Can you build insect-level robots that can roam in very complex, cluttered locations? “
According to Chen, “the challenge of building small aerial robots is enormous.” Pint-size drones require a radically different construction from larger ones. Larger drones are usually powered by motors, but the motors lose efficiency when you shrink them. Therefore, Chen says, for insect-like robots “you need to look for alternatives.”
The major alternative so far, is a small, rigid actuator made from piezoelectric ceramic material. While piezoelectric ceramics have allowed the first generation of small robots to fly, they are quite fragile. And this is a problem when you’re building a robot to mimic an insect – the foraging bumblebee endures a collision once every second.
Chen designed a more flexible small drone using softer actuators rather than harder, more delicate ones. Soft actuators are made of thin rubber cylinders wrapped in carbon nanotubes. When voltage is applied to carbon nanotubes, they produce an electrostatic force that squeezes and amplifies the rubber cylinder. Repeated elongation and contraction makes the wings of the drone beat faster.
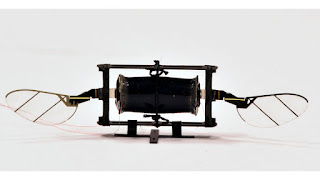
Chain actuators can flap approximately 500 times per second, providing drone insect-like flexibility. “You can kill it when it flies, and it can recover,” Chen says. “It can also perform aggressive maneuvers like Somersault in the air.” And it weighs just 0.6 grams, about a big bumble bee. The drone looks like a small cassette tape with wings, though the chain is working on a new prototype the size of the dragonflies.
“Achieving flight with a centimeter-scale robot is always an impressive feat,” says Pharrell Hellbling, assistant professor of electrical and computer engineering at Cornell University, who was not involved in the research.